Es ist schon wieder eine ganze Weile her, dass hier etwas passiert ist. Auch bei Twitter habe ich mich seit Monaten nicht mehr angemeldet, seitdem Elon Musk das Unternehmen übernommen hatte. Dies war aber nur noch ein Grund neben anderen, mich nicht mehr so sehr mit Twitter zu beschäftigen. Ich finde einfach kaum Zeit im Berufsalltag bzw. wenn ich Zeit habe möchte ich diese lieber mit Kaffee-trinken oder Kolleg*innen quatschen verbringen, als in Social Media. Außerdem habe ich jetzt zwei kleine Kinder, die viel Aufmerksamkeit bekommen, was gut so ist.
Ich bin mir daher noch nicht sicher, ob ich diesen Blog einfach in nächster Zeit vom Netz nehme oder einen Neustart wage. Zur Zeit erreichen mich vor allem Meldungen zur Wartung, php-Version aktualisieren, veraltete Links,… Zu einer Reaktivierung muss es aber auch anders in den Arbeitsalltag passen, schließlich ist schreiben in der Öffentlichkeit noch etwas anderes als Unterrichtsvorbereitung. Es kommt obendrauf, da Ideen, Texte und Materialien überarbeitet und angepasst werden müssen. Grundsätzlich gefällt mir die Idee von freiem Austausch und Reflexion, aber mal sehen was die Praxis an (Zeit)Räumen mit sich bringt.
Ich bin ein Freund offener Software, von Recycling und gesellschaftskritischem Abwägen von Technik und Material. Dennoch habe ich mir vor einiger Zeit ein iPad für schulische Zwecke zugelegt und möchte im folgenden Begründen, warum ich vorhabe, es in Zukunft noch ausgiebiger zu nutzen.
Es fing damit an, dass ich seit Beginn meines Schuldienstes in Hamburg vor dreieinhalb Jahren in verschiedenen Initiativen zur schulischen Nutzung digitaler Werkzeuge und Geräte beteiligt war.
Auf der Software-Seite gibt es viel Nützliches, viel Notwendiges aber auch einiges an Marketing-Strategie oder für den Schulalltag kaum brauchbare Angebote. Zunächst stellt sich die Frage der Zielsetzung des Einsatzes von Software in Schule. Zur Arbeitsorganisation in Form digitaler Klassenlisten, Notizen oder der Verwaltung personenbezogener Daten nutze ich weiterhin ein Papierbuch. Zum Einen, da ich damit Routine habe und es mir (noch?) keine Vorteile verschafft, Klassenlisten digital suchen zu müssen, statt sie bequem mit einem Handgriff aufzuschlagen. Zum Anderen, da ich so sichergehen kann, dass meine Noten nicht in falsche Hände geraten und ich mir über Datenschutzbestimmungen und Persönlichkeitsrechte weniger Gedanken machen muss. Und zum Dritten, da ich kein Freund von Automatisierung des Pädagogischen bin und Notengebung für mich nicht (reine) Berechnung ist, sondern eine Frage der Einschätzung der Leistung als Gesamtbild. Nicht ohne Grund lassen sich automatisch berechnete Noten in Software (z.B. das in Hamburg zentral verwendete DiViS) auch händisch anpassen. Hier genügt es mir zur Dokumentation meine Papier-Unterlagen zu haben und zugleich das Zeugnisprogramm rechnen zu lassen, da brauche ich keine zusätzliche Software und um die Datenschutz-Belange kann sich bequem die Behörde in ihrem zentralistischen System kümmern.
Dennoch ist es immer wieder nützlich, schnell vergängliche Notizen machen zu können, z.B. ToDo Listen für den Tag oder die Woche, die ich nun eher auf dem Tablet erledige. Elterngespräche oder Konflikte zwischen Schüler_innen dagegen dokumentiere ich in der Schülerakte aus Papier und zusätzlich in meinem Papierkalender, damit ich das zuverlässig vorliegen habe.
Schule ist auch Teil einer Behörde, ein geschützter Raum mit Privillegien und Verantwortung, der eine andere Umgangsweise erfordert, als Wissenschaftler_innen oder Medienunternehmen dies in Social Media oder auch in der vernetzten Öffentlichkeit des Internets haben. Hier sehe ich im Laufe der Jahre auch einen der Gründe, warum das Bloggen als Lehrer_in nicht so leichtfällt, wie wissenschaftlich oder medienpädagogisch interessierte Person. Viele Dinge des Alltags, die mich beschäftigen sind vertraulicher Natur (xy hat wieder das gemacht, woran liegt es?) oder es bedarf eines Zusatzaufwandes, die Materialien, Gedanken und Geschriebenes auf die öffentliche Wirkung zu überprüfen.
Selbstreflexiv: Dieser Blog-Artikel könnte von Vorgesetzten, Eltern und meinen eigenen Schülerinnen gelesen werden, auch potentiell zukünftige Vorgesetzte, Eltern und Schülerinnen. Daher bin ich z.B. auf Twitter auch fokussiert auf fachiche und didaktische Beiträge, mache Einschätzung zu einem Tool oder einem Ereignis, aber schreibe selten über Gefühle oder Persönliches. Ich würde mich ja auch nicht in die Pausenhalle, auf eine Lehrerkonferenz oder eine Elternversammlung stellen und laut aus meinem Privatleben berichten.
Dann gibt es die Nutzung von Informatiksystemen im Unterrichtskontext, die harte Technik. Hier könnte viel mehr passieren und ich mache gerade neue Erfahrungen, obwohl ich mich über zehn Jahre intensiv mit dem Thema beschäftige. Zur Zeit leite ich zusammen mit einer Kollegin eine Schulentwicklungsgruppe zu Digitalisierung in meiner Schule. Wir evaluieren die Bedürfnisse und Potentiale unseres Kollegiums in Bezug auf digitale Werkzeugnutzung im Unterrichtsgeschehen, haben auch erste Erfolge und entwickeln Ansätze für weitere konkrete Schritte im System.
Hierbei bin ich auf Reflector aufmerksam geworden, ein kostenpflichtiges Tool, mit dem sich der Bildschirm eines mobilen Endgerätes als Beamerbild spiegeln lässt. Das kann ich auch mit meinem Laptop über HDMI (Kabelgebunden, aber für viele Anwendungen ok). Aber was ich mit einem Tablet zusätzlich kann ist:
Ergebnisse von Schüler*innen direkt per Kamera zügig an die Tafel bringen (per Foto oder Live-Kamera)
Schüler*innnen auf dem Tablet an ihrem Platz Lösungen entwickeln lassen, ohne dass sie vorne am Smartboard schreiben müssen (wobei ich damit mein privates Gerät einem gewissen Risiko aussetze)
Sollte die ganze Klasse mit ihrem Tablet ausgestattet sein, z.B. Hausaufgaben zügig vergleichen, da die verschiedenen Geräte schnell angesteuert werden können.
Zudem ist ein Tablet schnell griffbereit, handhabbar wie ein Skizzenblock und besonders für das Betrachten von digitalen Inhalten leichtfüßiger als Laptops. Smartphones dagegen haben einen recht kleinen Bildschirm und haben für den Unterricht keinen Vorteil gegenüber Tablets, außer, dass der überwiegende Teil der Schüler*innen sie bereits besitzt. Laptops sind für einige Aufgaben besser geeignet als Tablets, z.B. längere Texte verfassen oder für die umfangreichere Softwareentwicklung. Demgegenüber lassen sich Tablets zügig direkt verwenden, da sie meist in Standby gehalten werden und sind mobiler als Laptops einsetzbar, z.B. als Kamera zur Bild und Videoaufnahme.
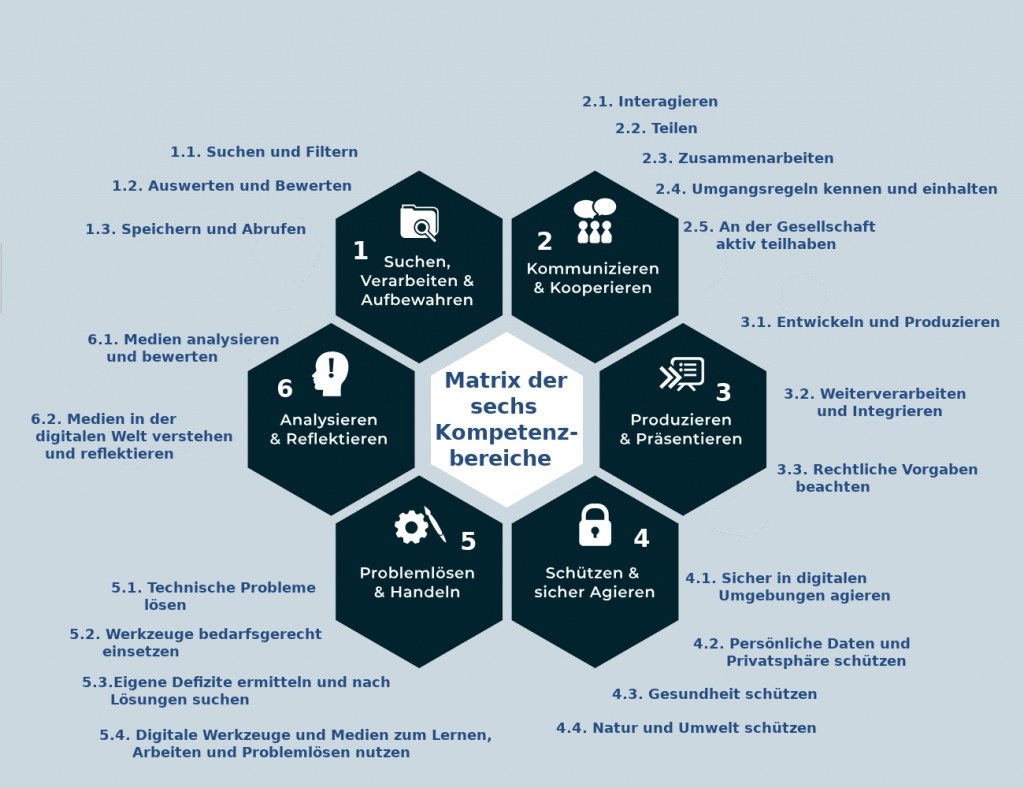
Der Großteil von üblichen Unterrichtsformaten erscheint mir mit Tablets gegenüber Laptops gut realisierbar, da es sicht um häufigen Wechsel und meist einer Betrachtung von Medien handelt. In der Diskussion kristallisiert sich heraus, dass eine Ausstattung ganzer Klassen mit Tablets den Unterricht nicht nur methodisch und inhaltlich bereichern kann, sondern uns auch anders als bisher ermöglicht, unserer Pflicht als Schule nachzukommen, die von der Kultusministerkonferenz beschlossenen digitalen Kompetenzen umfangreich und systematisch zu fördern. Im Folgenden ein von mir erstellter Überblick über diese Kompetenzen:
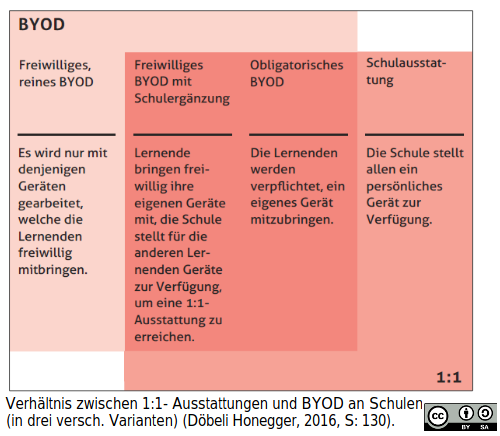
Zur Zeit sind wir mit Laptopwägen und Smartboards recht gut ausgestattet, aber verglichen mit den Möglichkeiten, die persönliche Endgeräte mit sich bringen, ist die Nutzung recht beschaulich. Warum persönliche Endgeräte? Weil diese sich an die persönlichen Anforderungen anpassen lassen und weil sie Verbindlichkeit schaffen. Verschiedene Varianten sind denkbar.
Und warum ausgerechnet iPads? Die einheitliche Plattform mit an Schule angepasster Verwaltungssoftware zur Administration und unterrichtlichen Verwendung ist attraktiv für einen reibungslosen Ablauf. Schule ist eine sehr heterogene Umgebung, wo oft Zeit eine entscheidene Rolle spielt. In einer Unterrichtsstunde kostbare Minuten zu verlieren, um die Technik in den Griff zu bekommen kostet nicht nur Nerven, sondern führt oft dazu, dass Kolleginnen Technik vermeiden. Zudem sind die technischen Kenntnisse von Lehrerinnen sehr unterschiedlich und oft nicht besonders hoch, so dass es wenig Bereitschaft gibt, sich intensiv in Bereiche einzuarbeiten, die möglicherweise nach ein paar Jahren schon wieder nicht mehr nützlich sind. Sicher wäre hier auch eine informatisch-technische Grundbildung verpflichtend für alle Lehrer*innen in der Ausbildung wünschenswert, wie nun in der Schweiz umgesetzt, dies ist aber zur Zeit nicht abzusehen und würde auch nicht alle oben genannen Anforderungen nivellieren.
Sollte es möglich sein, die digitalen Arbeitsmaterialien und -ergebnisse von Schüler*innen weiterhin in einer schuleigenen oder Behördeneigenen Cloud / Speicher abzulegen, wie beispielsweise in einem Content Management System wie Moodle, können die Apple-eigenen Lösungen umgangen werden, um auf dieser Ebene möglichst datensparsam zu arbeiten.
Wichtig ist jedenfalls, in Schule Erfahrungen zu sammeln und auszutauschen, um auf dem Gebiet der Nutzung digitaler Lernumgebungen vor allem auch zum Erwerb der für den Alltag dringend benötigter Grundlagen zu digitalen Medien, Werkzeugen und Informatiksystemen wie von der KMK gefordert große Schritte aufzuholen und nicht noch weiter hinter die gesamtgesellschaftliche Entwicklung zurückzufallen.
Seit mehreren Wochen bin ich dabei, testweise mit Arduinos in Klasse 8 im Wahlpflichtfach Informatik zu arbeiten. Bisher hatten wir die LEGO-Mindstorms verwendet und uns in den Parallelkursen abgewechselt. Weitere Inhalte in Klassen 8 sind Programmierung mit Scratch und Grundlagen der Informatik (da der Informatik-Unterricht in Klasse 8 startet).
Die Kompetenzen zu dem bisherigen Block (ca. 8 Wochen dreistündig) sind Folgende:
die Roboter-Sensoren nennen und deren Aufgaben beschreiben.
in der Programmiersprache NXC das Ansteuern der Sensoren implementieren.
Kontrollstrukturen implementieren und so auf Signale der Sensoren reagieren.
Variablen anhand von gegebenen Aufgaben implementieren.
Diese sollen entsprechend vergleichbar mit dem Arduino statt dem LEGO Mindstorms abgedeckt werden.
Schule ist im Allgemeinen sehr vereinnahmend und der Blick über den Tellerrand in Wissenschaft oder nicht-direkt-schulbezogene Themen ist ein gewisser Luxus, wenn es auch noch ein Privatleben jenseits beruflicher Themen geben soll. Auch Aktivitäten wie die eines Lehrer_innen-Blogs oder auf Twitter zu Bildung und Technik zu lesen und zu schreiben sind nicht Priorität im Schulalltag, sondern kommen oben drauf zum Unterrichten, zu Elterngesprächen, Korrekturen, Konferenzen und verbindlichen Fortbildungen. Aber es macht natürlich auch Spaß und inspiriert.
Am Wochenende war ich in Berlin in der technischen Universität zu der von Gruppen und Organisationen aus verschiedenen Spektren initiierten Konferenz „bits und bäume“, die alle nichts direkt mit Schule zu tun haben, wohl aber mit Technik und ökologischen Themen. So war der Chaos Computer Club und das Forum InformatikerInnen für Frieden und gesellschaftliche Verantwortung e.V. (FIfF) dabei, aber auch der BUND, germanwatch und viele kleinere Initiativen, vor allem solche, die sich an der Schnittstelle ökologischer und informationstechnischer Fragestellung engagieren. Zum Beispiel die Initiative „Fair lötet“, die sich dafür einsetzt, konfliktfreie und faire Produkte zu entwickeln und dafür die Lieferkette der Bestandteile analysiert und auf möglichst ökologisch und sozial abgebaute Rohstoffe und deren Verarbeitung setzt. Continue reading »
Letzten Donnerstag wurde das digital.learning.lab vom Hamburger Bildungssenator Thies Rabe auf einer großen Veranstaltung mit zahlreichen Workshops und Gesprächsrunden am Gymnasium Altona vorgestellt und die webbasierte Plattform mit Unterrichtsmaterialien, Toolbeschreibungen und Rezensionen zu externem Materialien veröffentlicht. Die Plattform zu Bildung und Digitalisierung wurde von der Technische Universität Hamburg (TUHH), der Behörde für Schule und Berufsbildung (BSB) und der Joachim Herz Stiftung entwickelt.
Startseite des digital.learning.labs, Strukturiert nach den Kompetenzen des KMK Strategiepapiers
Ich arbeite seit einem halben Jahr bei der Initiative „digitale Unterrichtsbausteine“ der BSB mit, die ein Kernelement des digital.learning.labs darstellen und habe mit einem Kollegen aus der Informatik einen unserer Bausteine in einem Workshop am Gymnasium Altona vorgestellt. Die Unterrichtsbausteine verschiedener fachlicher Schwerpunkte von Deutsch über Religion bis Mathe werden erstellt, um Impulse für die Umsetzung der Digitalstrategie der Kultusministerkonferenz in Hamburg zu setzen. Das Strategiepapier der KMK-Konferenz von 2016 bietet Orientierung, welche Schwerpunkte zu Bildung und Digitalisierung in allen Fächern aller Schulen aller Bundesländer zukünftig erwartet werden. Hierzu gibt es durchaus auch kritische Anmerkungen von Seiten der Gesellschaft für Informatik, wie in einem Vortrag auf unserer Fachtagung der SH-HILL von Prof.Dr.Torsten Brinda.
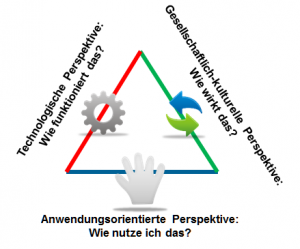
Das praktische, konkrete Arbeiten an gutem Unterricht ist motivierend und es gibt auch Gestaltungsspielraum zu Schwerpunktsetzungen. So haben wir als Zweierteam uns entschieden, zunächst Bausteine zu entwickeln, die eher grundlegende Themen der Informatik betreffen, wie sie in den Hamburger Bildungsplänen in Natur und Technik im Bereich „Daten und Informationen“ für Klasse 5 und 6 formuliert sind. So war unser erster Baustein entstanden unter der Fragestellung „Wie passen hunderte von Fotos und Videos auf einen USB-Stick?“ und zielte damit auf den Aspekt des Dagstuhl-Dreiecks „Wie funktioniert das?“.
Unser zweiter Baustein, nun öffentlich, bezieht sich ebenfalls auf Klasse 5 und 6, indem eine kleine Ampelsteuerung mit Arduino als Unterrichtsvorhaben vorgestellt wird: „Wie funktioniert eine Ampelsteuerung?“
Der dritte Baustein, der Schwerpunktthema im Workshop war und auch praktisch von Fachkolleg_innen und anderen interessierten Lehrkräften in den beiden Workshops erprobt wurden bezieht sich auf den Wahlpflichtbereich Klasse 8/9 Informatik mit „Wie funktionieren Sprachnachrichten?“, wozu wir in einer Doppelstunde natürlich nur ansatzweise Antworten erarbeiten können.
Mit der App „phyphox“ der RWTH Aachen lassen sich mit einem mobilen Endgerät Schallwellen aufzeichnen und als CSV-Daten exportieren. Diese lassen sich in einer Tabellenkalkulation analysieren und anschließend werden mit Audacity weitere Attribute von Audio-Daten unter die Lupe genommen. Soweit im Groben die Idee. Im Praxistest zeigten sich einige Potentiale der Überarbeitung, aber auch Zustimmung zur Baustein-Idee. Schön wären vor allem:
Audacity als App (existiert – bisher – nicht)
eine Rückübersetzung einer CSV-Datei als Audio-Datei / Klang, z.B. als Import in Audacity
Den vierten Baustein zu „Datenkompression“ konnten wir im Workshop nur kurz andeuten, aber vielleicht ergibt sich ja nochmal eine Gelegenheit, die Bausteine der Öffentlichkeit schmackhaft zu machen.
Pressemitteilungen und weitere Artikel zum Thema „Digital.learning.lab“:
Nun da das Schuljahr vorbei ist und die Ferien beginnen, finde ich zwischenzeitlich Zeit und Lust, noch ein paar Gedanken loszuwerden. Ich bin gerade in Ecuador, wo ich zwei Jahre als OLK in der Deutschen Schule in Cuenca gearbeitet hatte – ein erster Besuch seitdem wir wieder in Hamburg leben. Hier habe ich viele Impulse bekommen für sprachsensiblen Unterricht und viel über mich selbst gelernt in der Perspektive, „der Andere“ zu sein (was schwer zu vergleichen ist mit Migrant*innen in Deutschland, da ich hier im postkolonialen Ecuador viele Privillegien als „weißer“ europäischer Migrant hatte, also nicht von Rassismen betroffen bin, wie viele Menschen, die nach Deutschland und Europa kommen).
Ich möchte in diesem Artikel aber nicht über Ecuador oder das Unterrichten an Deutschen Auslandsschulen schreiben, sondern über sprachsensiblen Mathematikunterricht mit Geflüchteten in Hamburg.
Zunächst war meine Lerngruppe, so wie vermutlich viele der internationalen Vorbereitungsklassen (IVK) sehr heterogen in Lernstand, Vorbildung und Tempo, nicht allein fachlich, sondern auch in Bezug auf allgemeine Lernstrategien. Einige Jugendliche hatten vor ihrer Ankunft in Hamburg Mathe-Unterricht, andere seit Jahren nicht. Diese Umstände erfordern einen sehr individualisierten Unterricht, der aber in einer kleinen Lerngruppe, wie ich sie hatte – meist mit einer zusätzlichen pädagogischen Unterstützung – gut leistbar war. Die Klasse wird als 7.Klasse eingeordnet, das Niveau schwankt aber enorm.
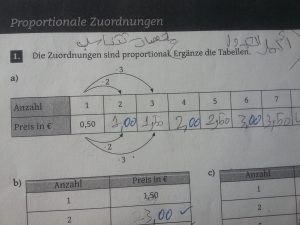
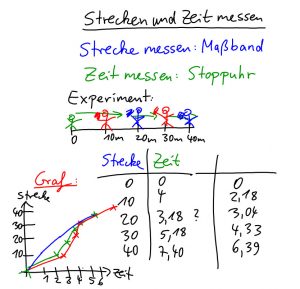
Die Themen bauen in der Mathematik nunmal stark aufeinander auf, so dass je nach Bedarf bei dem Rechnen mit Dezimalzahlen, wie in Klasse 7 durchaus üblich, angesetzt werden kann oder eben bei Bruchrechnung oder in einzelnen Fällen auch beim kleinen Einmaleins zurückgesprungen werden muss. Das alles ist kein Problem, da es keinen festen Lehrplan gibt, was so auch sinnvoll ist. Neben diesen eher auf Zahlenbereiche und Grundrechenarten bezogene Inhalte hat es sich angeboten, sowohl das Koordinatensystem und der Umgang mit dem Geodreieck einzubeziehen, als auch erste Erfahrungen mit digitalen Werkzeugen wie Geogebra anzubieten. Figuren zu zeichnen erfordert Konzentration und Feinmotorik und ist eine gute Abwechslung zum kalkülorientierten Hantieren mit Zahlen. Ein Koordinatensystem lässt sich auch prima mit Kreide auf dem Schulhof vorbereiten, um Schüler_innen dann Punkte oder Geraden aufstellen zu lassen. Messen und die Berechnung von Flächen und Volumina bieten einen guten Zugang zur direkten Umgebung und ermöglichen auch das Arbeiten im Freien und das Kennenlernen wichtiger Messgeräte wie Zollstock und Maßband. Eine Doppelstunde haben wir damit verbracht, verschiedene Strecken und Zeiten für einen 40 m Lauf zu messen und diese grafisch darzustellen, um die Darstellung von Daten zu üben und die Interpretation von Grafen, auch von Funktionen anzubahnen.
Ich bin in meinem ersten Durchgang relativ häufig thematisch gesprungen, es gab aber auch immer wieder Wechsel, d.h. Schüler_innen sind gegangen und gekommen, so dass ein „klassischer“ Aufbau kaum möglich war. Dies ist aber vielleicht auch eine Chance, den Unterricht stärker zu individualisieren und auf den/die Einzelne zuzuschneiden. Ich denke ein wichtiger Punkt ist neben individuellen Angeboten aber auch Kontinuität und Übung, d.h. viel selber rechnen, zeichnen, handeln. Es ist besonders schwierig, wenn zu hause wenig passiert und Materialien kaum strukturiert verwendet werden, was aber nicht überraschend ist, wenn man sich die Lebenssituation dieser jungen Menschen vor Augen hält. Diese sind geprägt von Unsicherheiten, wenig Struktur und wenig Kontinuität.
Die Fachsprache ist nicht nur für den fremdsprachlichen Fachunterricht eine eigene Herausforderung. Wie Objekte der Mathematik bezeichnet werden ist für die Verständigung wichtig, wichtiger aber erscheint mir noch das inhaltliche Verständnis. Ohne Begriffe wie „Multiplikation“ oder „Summe“ lässt es sich schwer arbeiten, aber ob es einen „Divisor“ gibt oder nicht, ist vielleicht weniger wichtig, als schriftlich multiplizieren und dividieren zu können. Wichtig bei der Einübung von Fachbegriffen erscheint mir das wiederholte Aufgreifen und Hervorheben einer überschaubaren Anzahl von zentralen Begriffen, ohne diese grammatikalisch einzuordnen. Einfache Sprache und Satzbildung (verbal und schriftlich als Tafelbild) ist manchmal gar nicht so einfach, lohnt sich aber sehr für das Verständnis.
Interessant waren hier die Vorkenntnisse einzelner Schüler_innen, die eine andere Schreibweise und Notation gelernt hatten, mit der sie aber ebenso wie mit meinem Vorschlag ans Ziel kommen. Hier habe ich mich bemüht, diese Vorkenntnisse zu stärken und wertzuschätzen und nicht die eine allgemeine Vorgehensweise durchzusetzen.
Ein Schuljahr ist eine kurze Zeit, um Grundlagen zu legen, aber ich denke alle Schüler_innen sind für sich einige Schritte vorangekommen. Manchmal habe ich vorhandenes Material genutzt, z.B. einzelne Seiten aus der „Intro“ Reihe, auch einmal Übungen aus unseren „RAAbits“-Ordnern die zu allen Arbeitsblättern Musterlösungen dabei haben, so dass auch recht eigenständiges Bearbeiten mit Musterlösung zum Vergleich möglich ist, d.h. auch, dass Schüler_innen zeitgleich einfach an unterschiedlichen Arbeitsblätter arbeiten können. Außerdem habe ich gelegentlich das Praxishandbuch „Sprachbildung im Mathematikunterricht“ verwendet. Viele Grafiken z.B. zur Bruchrechnung lassen sich aber leicht und ohne besondere Vorbereitung per Suchmaschine schnell im Netz finden und verwenden. Manchmal habe ich solche digitalen Grafiken auch abzeichnen lassen, das prägt sich auch besser ein, als diese als Kopie zu erhalten und spart Ressourcen.
Alles in allem gibt es viele Aspekte, die sich gar nicht so von anderem Mathe-Unterricht unterscheiden, vor allem das individuelle motivieren und verschiedene Zugänge und Niveaus einzuplanen. Ich freue mich auf das neue Schuljahr, wo ich voraussichtlich wieder etwas Mathematik-Unterricht in der IVK-Klasse geben werde und damit auch dazu beitragen kann, jungen Menschen in einer schwierigen Situation Wertschätzung und Bildungsangebote zu geben.
Am vergangenen Wochenende habe ich im Rahmen der diesjährigen SH-HILL-Fachtagung, die wir als Fachgruppe dies Jahr in die Tagung „Bildung in der digitalen Welt“ des Landesinsitutes für Lehrerbildung Hamburg integriert hatten, einen Workshop zu „Blogs als Lerntagebuch“ angeboten.
Als Ankündigungstext und Konzept hatte ich geschrieben:
„Lerntagebücher als Werkzeuge der Lernprozess-Reflexion bekommen durch webbasierte, interaktive Systemen wie Blogs im Vergleich zur traditionell-schriftlichen offline-Lerntagebüchern die Dimension der globalen Öffentlichkeit und bieten eine einfache Möglichkeit der Vernetzung durch Kommentarfunktionen und RSS-Feeds.
Im Workshop sollen verschiedene Praxisbeilspiele aus verschiedenen Unterrichtsszenarien in Sek. I vorgestellt und diskutiert werden, auch in Hinblick auf die Bevorzugung von Blogs gegenüber alternativen CMS oder sozialen Netzwerken zur Lernprozess-Reflexion.
Es ist auch möglich, im Workshop eigene Blogs einzurichten, wenn Rechner mitgebracht werden.“
Im Mathe-Unterricht der 9.Klasse ist das Thema zur Zeit „Kreis“. Als Abschluss des kurzen Blocks habe ich eine Aufgabe zur Modellierung mit Kreisen aus dem Buch: “Modellieren lernen – mit offenen realitätsnahen Aufgaben” von Gilbert Greefrath aufgegriffen, indem ich eine Kabellänge anhand eines Fotos bestimmen lassen habe.
Heute habe ich ein sehr viel detaillierteres Beispiel mit Daten zu den Abmaßungen aus dem Buch von Gerd Hinrichs verwendet und in unserem schuleigenen Moodle abgelegt, um eine Bearbeitung mit einer Tabellenkalkulation zu ermöglichen. Die Idee hierzu stammt ebenfalls aus dem Buch von Gerd Hinrichs.Continue reading »
Die Zeit vergeht, gut gefüllt und ohne neue Blogbeiträge. Unterricht, Klassenlehrer-Belange und Vater sein – dazu einige neue Herausforderungen wie wissenschaftliches Schreiben, Mitarbeiten an anderen Webplattformen wie Klexikon oder Serlo und die Content-Entwicklung im schuleigenen moodle, alles Tätigkeiten, die nicht direkt mit Veröffentlichungen und webbasiertem Arbeiten zu tun haben. Aber nun habe ich einen aktuellen Anlass, einmal zu schreiben.
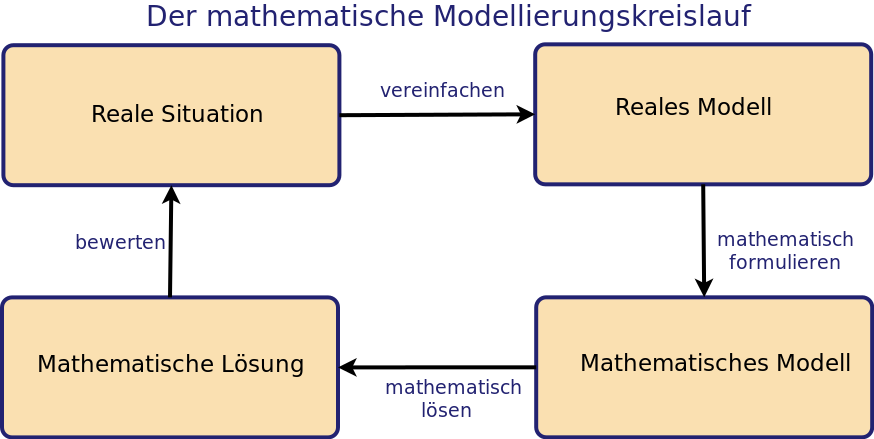
Im Rahmen der in Hamburg vorgesehenen Präsentationsprüfungen im Abitur als Alternative zur mündlichen Prüfung habe ich in meinem S4 Kurs grundlegendes Niveau das Thema Modellierung ins Zentrum der letzten Stunden gerückt, da Realitätsbezüge mir auch besonders wichtig über das Abitur hinaus erscheinen und zur Unterstützung der zahlreichen Prüflinge, die sich nun kreativ anwendungsorientiert ein Thema der Mathematik für ihre Prüfung suchen.